绝对最大额定值表2 绝对最大额定值
工作条件表3 推荐工作条件
电特性参数表4 接收器规格
芯片 5V 供电 常供电功耗 15mA,脉冲供电 110uA(LDO:ME6231A50M3G,R11 接 0R,R19 不接,C6:1uf;R17 不焊接脉冲供电,焊接 2k 常供电) 芯片 3.3V 供电 常供电功耗 10mA,脉冲供电小于 110uA(LDO:ME6231A33M3G,R11 不接,R19 接 0R;C6:0uf;R17不焊接脉冲供电,焊接 2k 常供电) 光感可根据客户实际需求设定调整; 延时时间是触发后保持该状态的时间,默认值为 5s,可根据需求设定; 封锁时间是指输出状态翻转后再次触发不响应的时间,默认值为1s。 外部配置电阻值与门限及延时时间关系表5外部配置电阻值与门限及延时时间关系
注:电阻 R14 是调感应门限的电阻,R16 是调延时时间的电阻。 感知范围区域
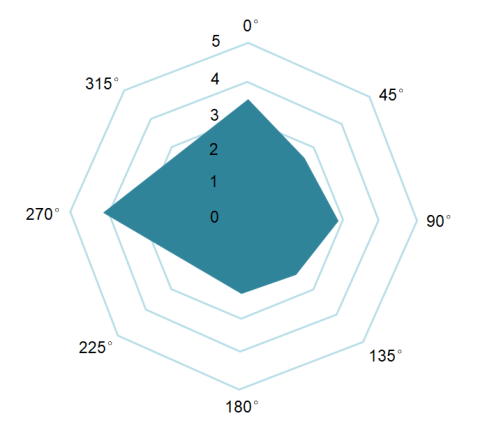
图 2 感知示意图
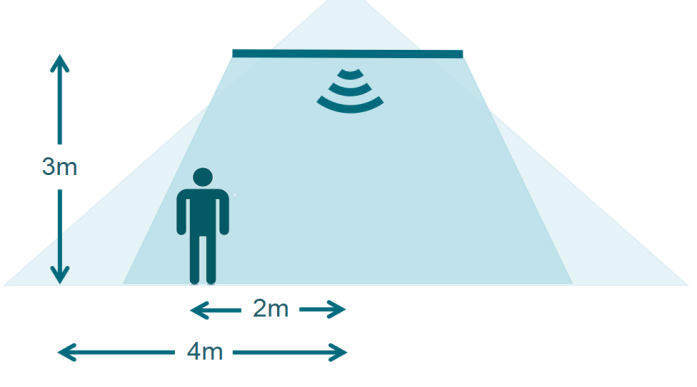
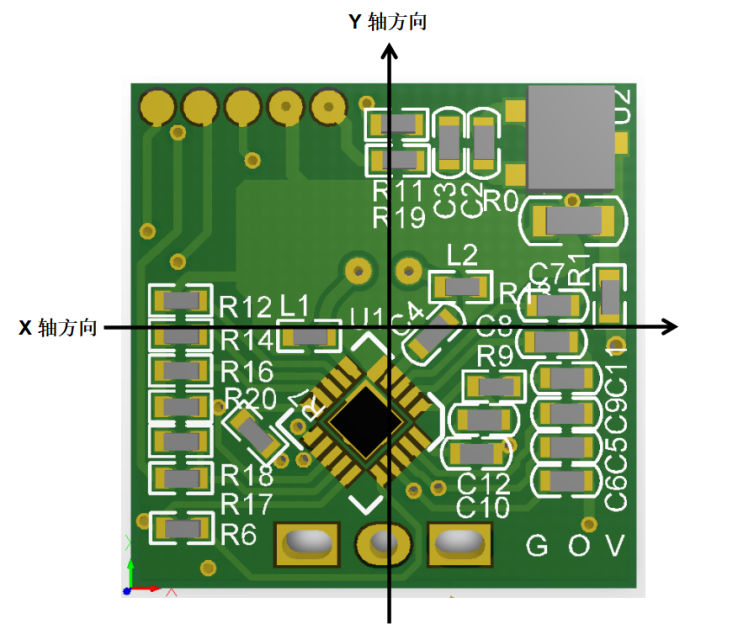
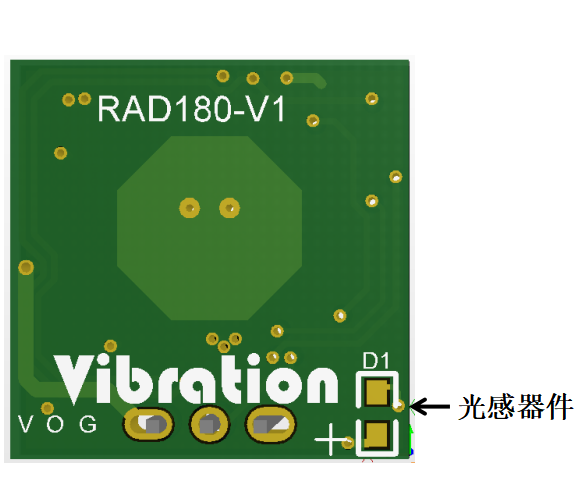
图 3 感知范围示意图 不同测试环境或运动目标,测试结果可能有差异; 金属外壳会对雷达电磁波有屏蔽作用, 影响感知距离; 以上测试结果是在标准测试场地测试得出,具体测试环境、条件,可咨询相关技术人员。 感知方向&光感器件
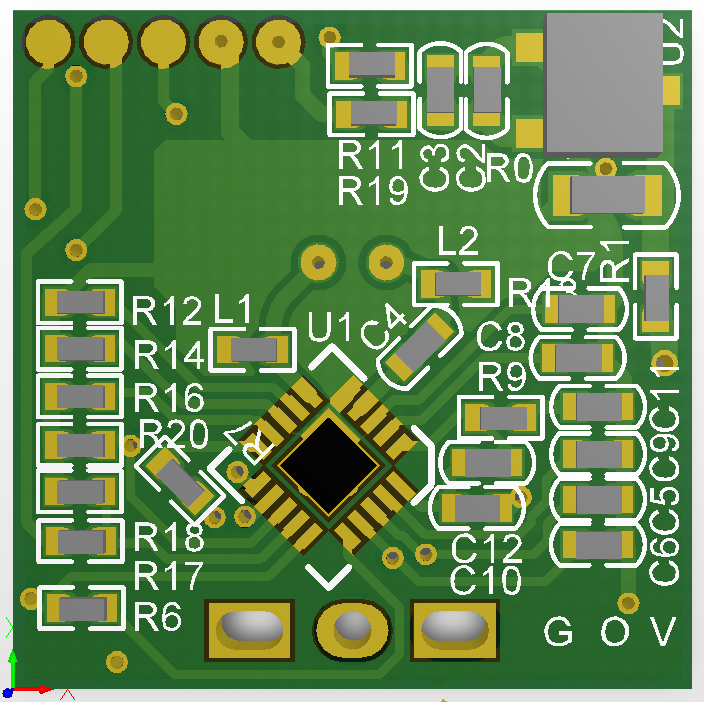
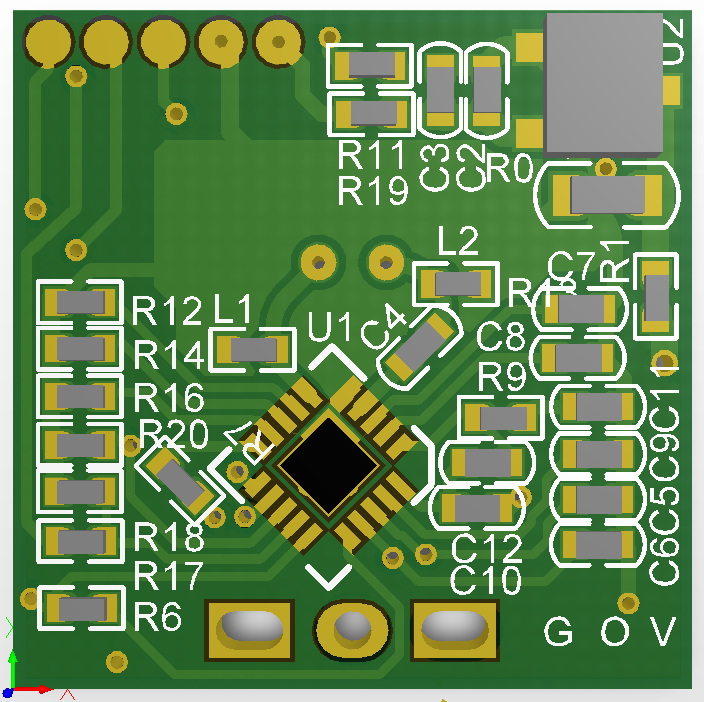
图 4 感知方向和光感器件 模块尺寸
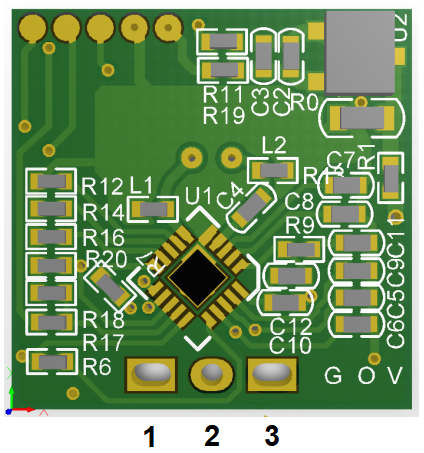
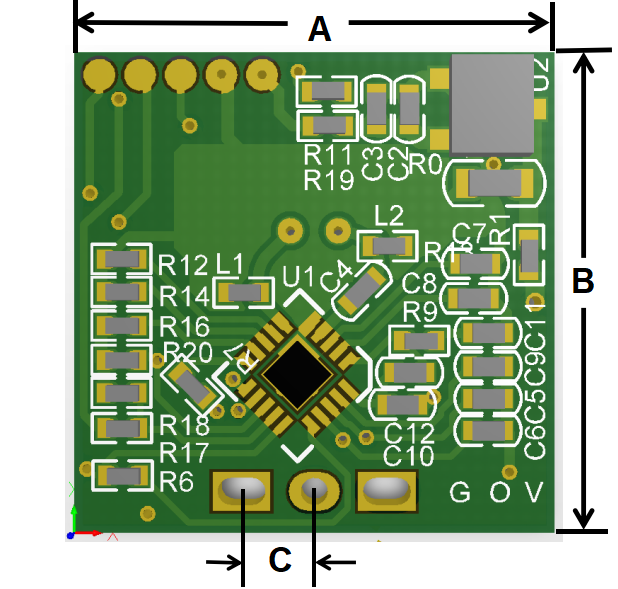
图 5 RAD180尺寸示意图 表6尺寸数据表
注:尺寸单位为 mm,V、O、G 接口顺序,孔间距为 2.3mm,孔径为 0.7mm。 应用电路图
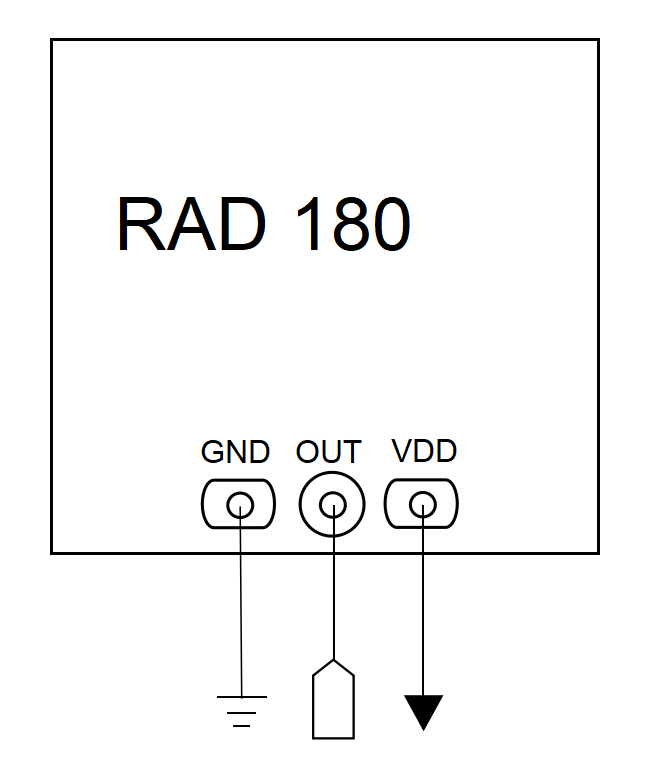
图 6 RAD180应用电路示意图 注意事项10.1配套的驱动电源设计注意事项务必采用输出电压、电流及纹波系数等都达标的驱动电源,驱动电源不稳定,电磁辐射太强,会造成雷达模组误报,无感知,循环自启等现象; 配套的驱动电源应在 3.3~12V,驱动电流不低于 1mA(或是 100mA),电源纹波幅度需控制在 100mV 以内,工频波动幅度要小; 驱动电源和雷达模组装配时,应避免雷达模组底部或天线面,正对驱动电源模块,且应尽量远离驱动电源模块里面的整流桥、开关变压器等工频干扰大的器件,以防干扰微波信号; ADC 管脚输入电压范围需控制在 0~3V 以内,否则超出范围将有可能损坏雷达模块。 10.2雷达模组测试和使用注意事项在四周有墙壁或障碍物反射微波的情况下,感知距离和感知角度会有增益;在四周较空旷的情况下,感知距离和角度会有衰减; 由于微波天线受到很小变化都可改变探测,所以请保护好天线,表面不要有金属物体(例如焊锡丝)等,避免影响感知距离; 轻拿轻放,避免激烈震动,雷达模组保持平整不变形;光感器件无遮挡和覆盖,特别是雷达模组上的感光元件 D1 周围,应避免有不透光的遮挡物; 4. 雷达模组保持独立使用空间,四周空间保持有 2mm 以上的自由空间间隔; 5. 通电后大约有 15s 初始化噪声分析时间,在此期间属于非正常感知工作; 6. 如果雷达模组的感光器件上面有遮挡(例如外壳等),需要重新测试确定感光门限值; 7. 产线测试和老化作业时,大量的雷达模组上电时若堆叠到一块的话,有可能会出现自激现象,请确保通电的雷达模组之间保持50cm 以上的安全距离。 10.3内置雷达模组的器件应用安装注意事项装配了雷达模组的器件,安装位置应远离通风管道、消防管道、排水管道、机械振动或有大型金属设备等强烈振动物体的地方,因为会影响雷达反射波和探测感知效果; 严禁带电作业,以免动作失误,接错,烧坏电路或触电; 避免安装在日晒雨淋的地方,防止损坏和影响使用寿命; 器件务必安装在远离电磁场的地方,以免电磁干扰产生误动作;也要安装在远离有物体固定转动或者摆动(例如电风扇,摇摆的树叶,风中晾晒衣服等)的地方,以免有误动作产生; 数个内置雷达模组的器件固定安装时,应保证各个器件之间的间距≥0.5m; 雷达微波模块的天线面建议距离产品外壳 3~5mm,否则会影响感知距离;
图 7 天线面与产品外壳的距离 器件内置雷达模组后,建议水平或垂直放置,在有效的感知范围内,尽量避免面对面安装两个或者更多的内置雷达模组的器件; 避免内置雷达模组的器件(例如灯具)附近,有其他光照物(例如应急灯,导向灯等干扰光源),以免造成器件(灯具)内置感光判断失效,使得器件(灯具)不能正常工作(常灭,误判为白天); 使用了内置雷达模组的器件(如灯具) 若一直工作(常亮),不能根据动目标探测进行开、关,则可能是雷达模组受到中频干扰,造成模组一直判断为有动目标在感知范围内活动。此时应关断电源,检查电源板的供电状态是否正常以及模组空间距离是否改变; 若以上问题还不能解决,请先断电和观察安装位置周围情况,先排除周围环境干扰因素的影响;重启电源后仍有问题,则考虑更换设备的驱动电源板,或者雷达模组再验证。 11、版本记录
|